A robot to test my firmware and ideas
After working on the first robot I decided that to step it up a bit I would need more electronics, as the cr01 is essentially not more complex than a simple RC toy.
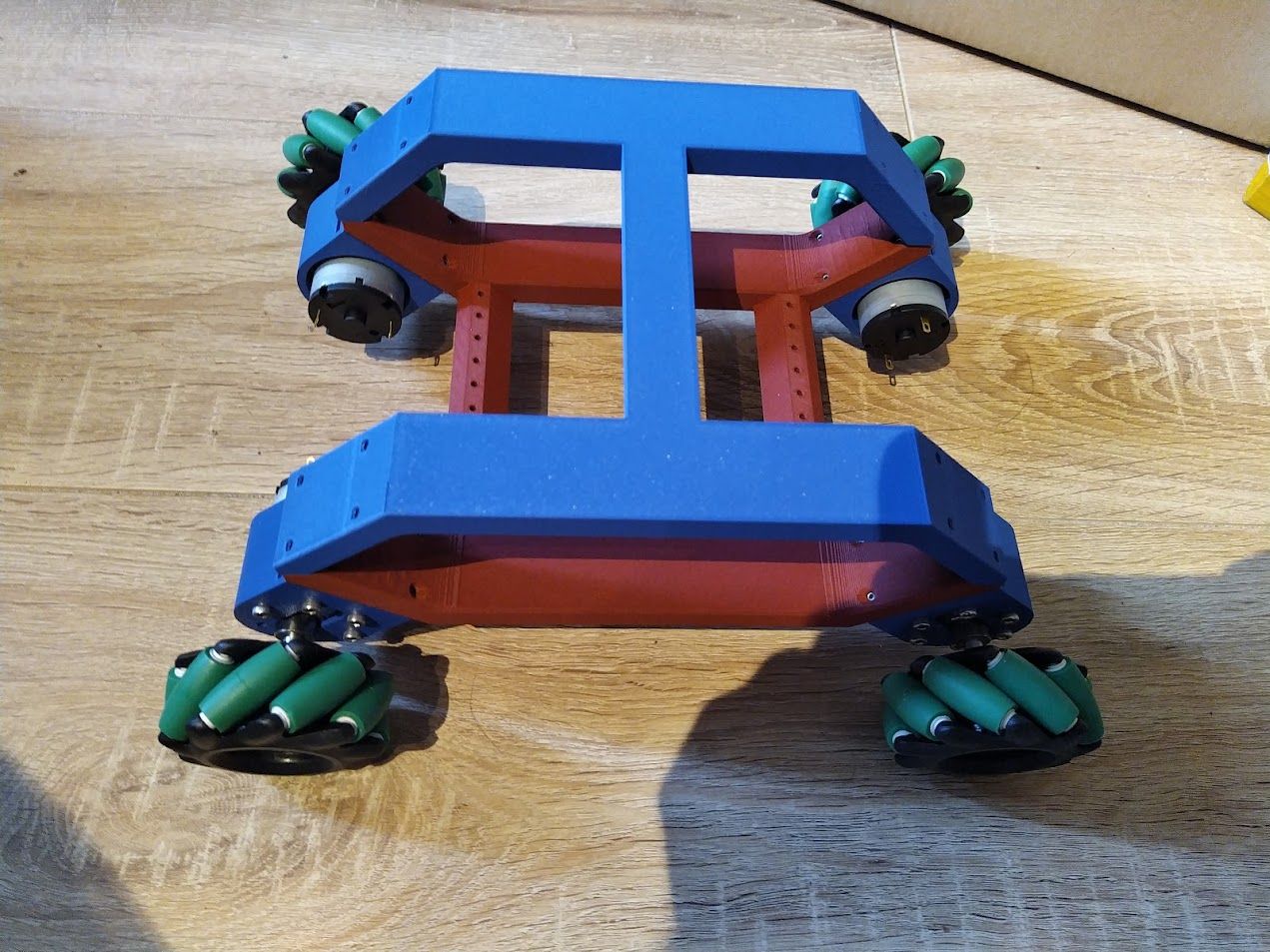
To work on the firmware and ideas I decided to build a bit larger Robot that I designed to have electronics and parts quickly changeable, in its current configuration (see YT video) I have 4 brushed motors, 2x2ESC, an ELRS receiver (configured to talk sbus) and an ESP32 running the firmware - the esp32 and the receiver I have on a through-hole pcb breadboard, which i've also created the pins and wiring on to connect 5 (currrently using 4) motors through servo plugs.
The current configuration also uses Mecanum wheels to drive sideways.
The firmware is written in C++.
Currently the main problem to solve is that the brushed motors spin slower backwards, which makes working with the mecanum wheels quite hard - im looking to either replace them with ones that have encoders so I can monitor velocity / position, or go the step further and use brushless ones that im more used to from my drones.