CR01 - my first ant-weight combat robot (name pending)
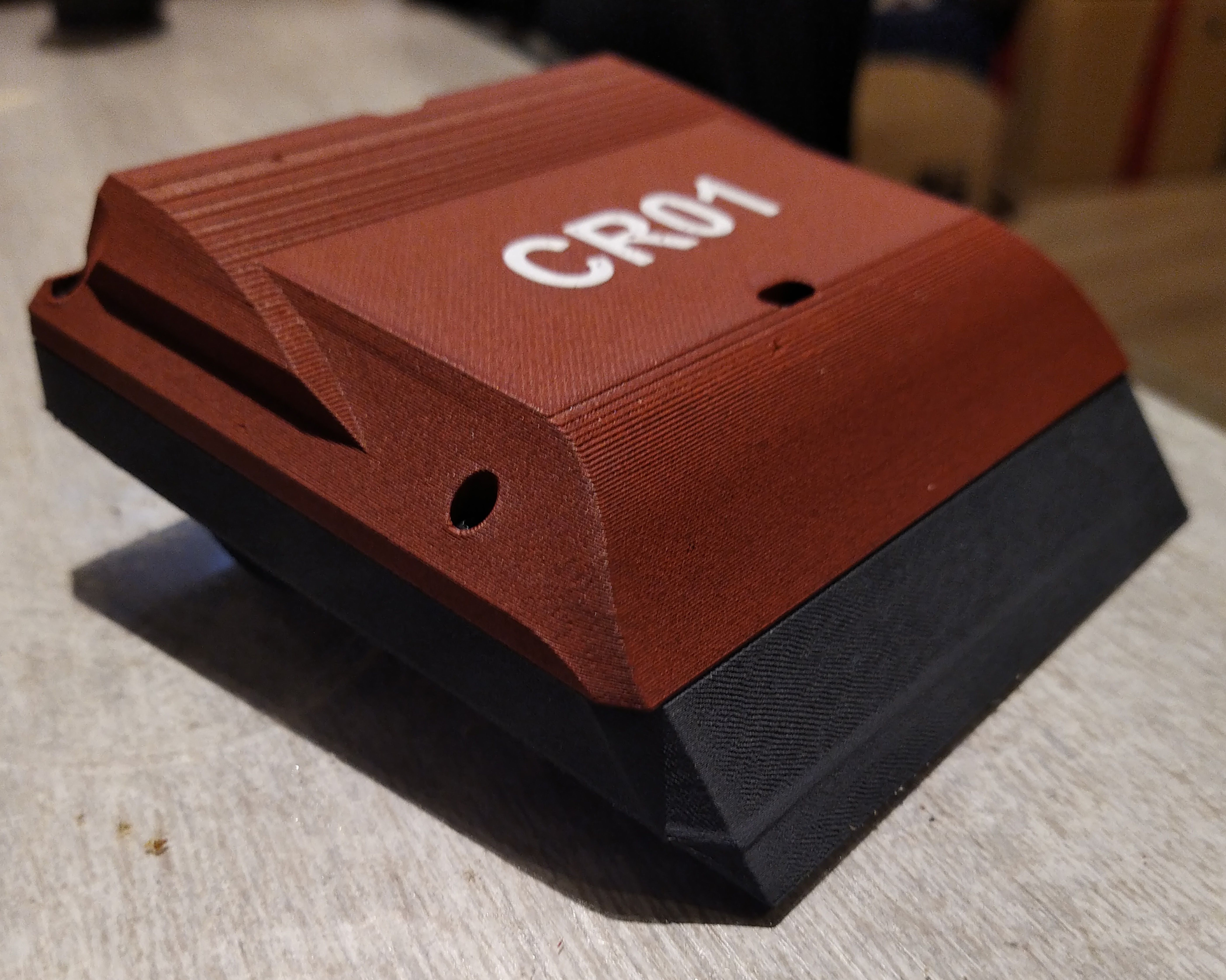
The CR01 (name pending) is my first attempt on building a combat robot - I have the chassis in various materials, the one in the photo is more of a "photo-armor", if I ever bring it to a fight (I hope I will), i'll bring a nylon variant.
why "name pending" I never came up with a better name.
Current Status it's in working state, can drive around and everything, but there is a few small changes I still want to make before I consider it complete. However I have no plans in progressing any further than those changes with this design, as I have some import learnings from this one, that I want to apply on a next attempt.
2023-08-23
I finally printed a second set of shells in Nylon (Bambulab PAHT-CF) - doesn't look as nice as the other print, but should be able to absorb any punishment much better.

2023-08-18 - some volt meter
One thing that worries me is when I have no clue on how a battery is doing, so i'm quite glad that my rx actually has a pin for checking battery voltage - I haven't found a way to calibrate it yet, but even if its off by .2 volts, thats still good enough to get an idea whats going on. I've stumbled in a bit of an issue when practicing driving: while i can steer and drive forward just fine, driving backwards always ends in a curve/turn, which is a bit of an issue - i've ruled out most sources i could think off and right now I suspect a problem with the dual-esc.
2023-08-17 - Second Print
After yesterdays success I did start to think a bit more about how the (quite tight) space is best used, so I gave some thought on how to sort everything, and then put in a few simple pieces to keep everything in one place, and now I can start getting an Idea to what length I eventually want to cut the cables down to.
I was quite happy to see how little battery it actually used, this means I can get smaller, lighter batteries and save both space and weight! So I'll have to redo at least the pieces holding the battery in its place right now soon.
I wonder if i can shorten the bot for 2cm or 3, maybe something to explore.
If I remove the pin headers from the RX, I might also be able to move the electronics in front of the battery, which in turn meant i could have the top plate on motor height, which would mean tires sticking out, allowing to drive when flipped.. but I'm not sure if that will fit with the new battery.
2023-08-16 - First Print
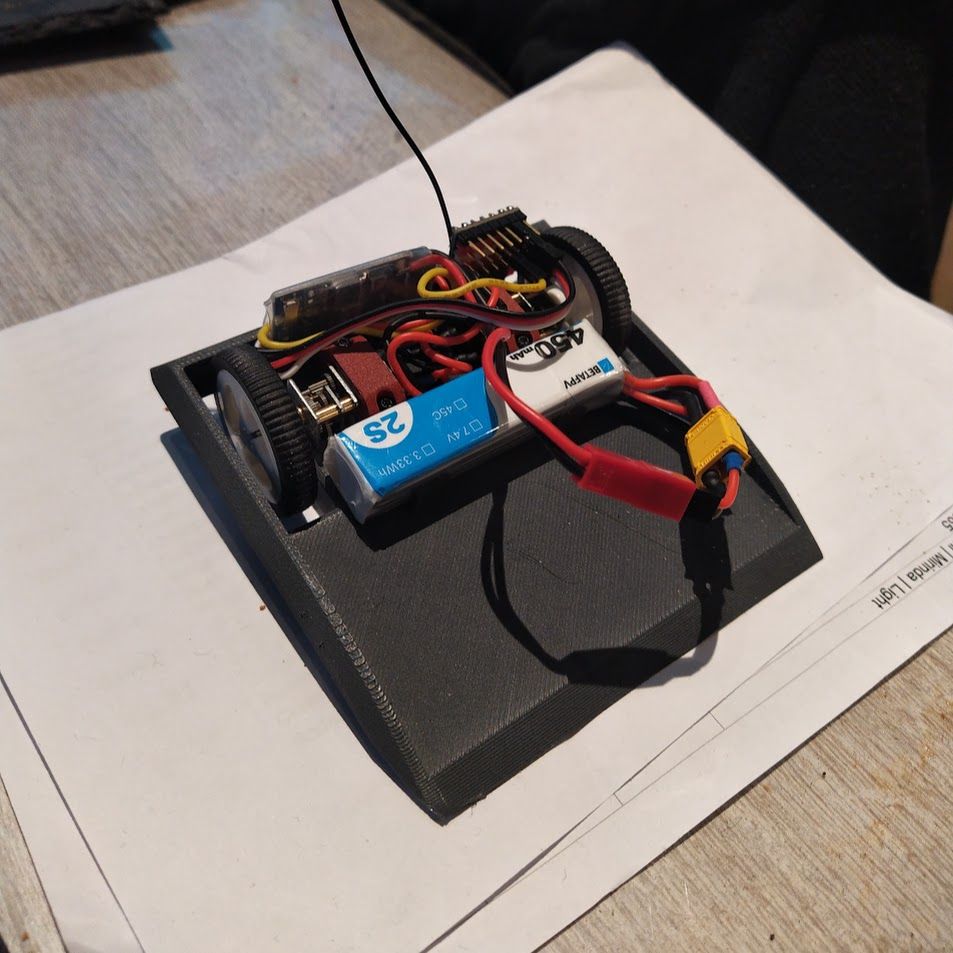
I started with a simple objective for today: put something drive-able together.
I've got a drive train kit from BBB, with N10 motors, their all in one controller and wheels, I added a Matek PWM ELRS RX, so I can use the same equipment as with my drones, so all I needed for having something driveable was basicly a simple floor plate, and some mounts for the motors. Amazingly BBB provided step files for some of the components, so I could load them into the CAD software I'm using, which made a few things a lot quicker in getting my measurements down.
I printed the first draft, soldered motors to the esc, and then zip-tied cables and board etc together so i could just lay it on the floor plate. The battery on the other side I put down with some doublt sided tape, so it wouldn't slide its mass around.
the result, as you can see in the youtube video is drive-able.